




ညှပ်ပါသော ကိုင်တွယ်ကိရိယာ
မိတ်ဆက်
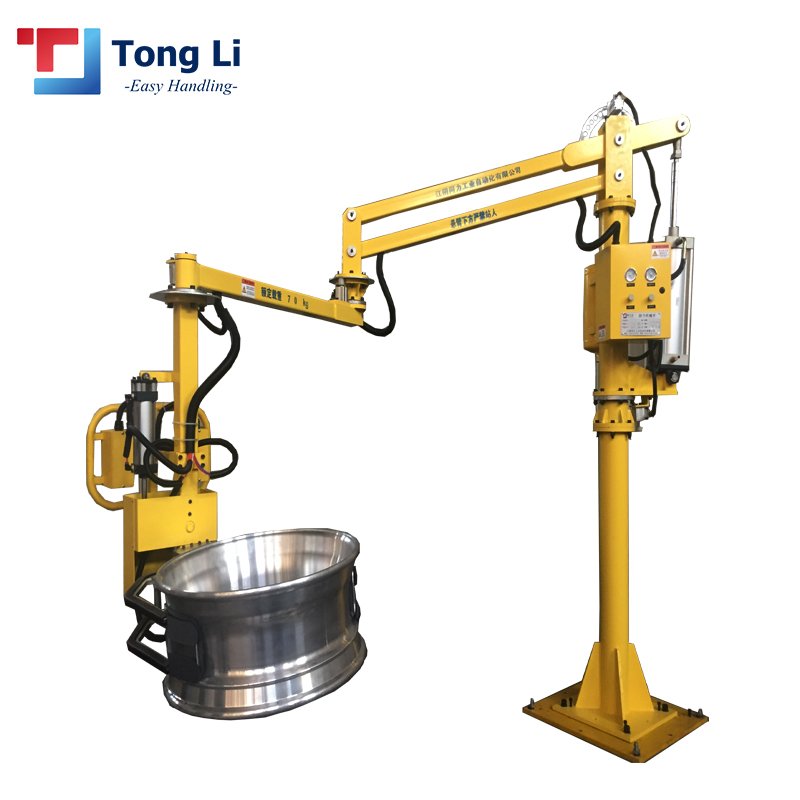
(က) တူညီသော အားကောင်းသော လက်မောင်းအကူအညီဖြင့် ကိုင်တွယ်သည့် ကိရိယာသည် ၂ ကီလိုဂရမ်မှ ၅၀၀ ကီလိုဂရမ်အထိ အလေးချိန်အမျိုးမျိုးကို ဟန်ချက်ညီစေနိုင်သည်။
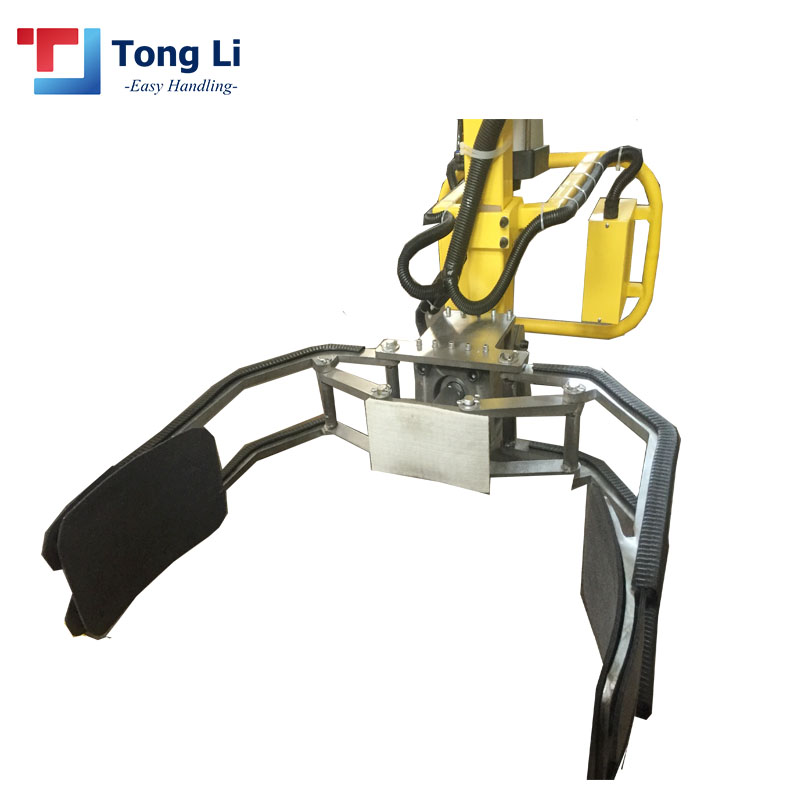
(ခ) ပါဝါအကူအညီဖြင့် ကိုင်တွယ်ကိရိယာကို ချိန်ခွင်လျှာညှိကိရိယာ၊ ဆုပ်ကိုင်ကိရိယာနှင့် တပ်ဆင်မှုဖွဲ့စည်းပုံတို့ဖြင့် ဖွဲ့စည်းထားသည်။
(ဂ) ကိုင်တွယ်ကိရိယာ လက်ခံကိရိယာသည် လေထဲတွင် ပစ္စည်းများ (သို့မဟုတ် အလုပ်အပိုင်းအစများ) ၏ ဆွဲငင်အားမရှိသော ပေါလောမျောနေသော အခြေအနေကို သဘောပေါက်စေသည့် အဓိကကိရိယာဖြစ်သည်။
(ဃ) ကိုင်တွယ်ကိရိယာသည် အလုပ်အပိုင်းကို ဆုပ်ကိုင်ခြင်းကို သဘောပေါက်ပြီး အသုံးပြုသူ၏ သက်ဆိုင်ရာ ကိုင်တွယ်မှုနှင့် တပ်ဆင်မှု လိုအပ်ချက်များကို ပြီးမြောက်စေသည့် ကိရိယာဖြစ်သည်။
(င) တပ်ဆင်မှုဖွဲ့စည်းပုံသည် အသုံးပြုသူ၏ ဝန်ဆောင်မှုဧရိယာနှင့် နေရာအခြေအနေများအရ စက်ပစ္စည်းအစုံအလင်ကို ပံ့ပိုးပေးသည့် ယန္တရားတစ်ခုဖြစ်သည်။

| ပစ္စည်းကိရိယာ မော်ဒယ် | TLJXS-YB-၅၀ | TLJXS-YB-၁၀၀ | TLJXS-YB-၂၀၀ | TLJXS-YB-၃၀၀ |
| စွမ်းရည် | ၅၀ ကီလိုဂရမ် | ၁၀၀ ကီလိုဂရမ် | ၂၀၀ ကီလိုဂရမ် | ၃၀၀ ကီလိုဂရမ် |
| အလုပ်လုပ်သော အချင်းဝက် | ၂၅၀၀ မီလီမီတာ | ၂၅၀၀ မီလီမီတာ | ၂၅၀၀ မီလီမီတာ | ၂၅၀၀ မီလီမီတာ |
| မြှောက်တင်အမြင့် | ၁၅၀၀ မီလီမီတာ | ၁၅၀၀ မီလီမီတာ | ၁၅၀၀ မီလီမီတာ | ၁၅၀၀ မီလီမီတာ |
| လေဖိအား | ၀.၅-၀.၈Mpa | ၀.၅-၀.၈Mpa | ၀.၅-၀.၈Mpa | ၀.၅-၀.၈Mpa |
| လှည့်ထောင့် A | ၃၆၀° | ၃၆၀° | ၃၆၀° | ၃၆၀° |
| လှည့်ထောင့် B | ၃၀၀° | ၃၀၀° | ၃၀၀° | ၃၀၀° |
| လှည့်ထောင့် C | ၃၆၀° | ၃၆၀° | ၃၆၀° | ၃၆၀° |






(က) ၎င်းသည် မတူညီသောအလေးချိန်ပစ္စည်းများ၏ ဆွဲငင်အားချိန်ခွင်လျှာအခြေအနေကို သိရှိနိုင်ပြီး၊ ၎င်းသည် ပစ္စည်းများ၏ တိကျသောလွှဲပြောင်းမှုလုပ်ဆောင်ချက်အတွက် သင့်လျော်သည်။
(ခ) ဝန်မရှိ၊ ဝန်အပြည့်နှင့် မတူညီသော workpieces များကို လုပ်ဆောင်သောအခါ၊ စနစ်သည် အလေးချိန်ပြောင်းလဲမှုကို ခံစားနိုင်ပြီး သုံးဖက်မြင်အာကာသတွင် ဝန်၏ floating state ကို သိရှိနိုင်ပြီး၊ ၎င်းသည် တိကျသောနေရာချထားမှုအတွက် အဆင်ပြေပါသည်။
(ဂ) အပြည့်အဝဟန်ချက်ညီမှု၊ ချောမွေ့သောရွေ့လျားမှု စသည်တို့၏ ဝိသေသလက္ခဏာများသည် အော်ပရေတာအား အလုပ်အပိုင်းကို ကိုင်တွယ်ခြင်း၊ နေရာချထားခြင်းနှင့် တပ်ဆင်ခြင်းတို့ကို အလွယ်တကူ လုပ်ဆောင်နိုင်စေပါသည်။
(ဃ) တောင့်တင်းသောလက်မောင်းသည် ကိုင်တွယ်သူအား အလုပ်အပိုင်းအစကို အတားအဆီးများပေါ်တွင် သယ်ဆောင်နိုင်စေနိုင်သည်။ အလျားလိုက်လက်မောင်းသည် သက်ဆိုင်ရာနေရာများတွင် ပစ္စည်းများကို အလျားလိုက်နေရာချထားခြင်းနှင့် အလျားလိုက်ဖယ်ရှားခြင်း၏ လိုအပ်ချက်များကို ဖြည့်ဆည်းပေးနိုင်သည်။
(င) စနစ်သည် ကိုင်တွယ်သူ၏ ဦးခေါင်း၏ အဆင့်ကို အမြဲထိန်းသိမ်းထားနိုင်ပြီး အလုပ်လုပ်နိုင်စွမ်း မြင့်မားသည်။
(စ) ပစ္စည်းများကို ကျယ်ပြန့်သောနေရာတွင် ကောက်ယူခြင်းနှင့် နေရာချထားခြင်းတို့ကို လုပ်ဆောင်နိုင်ရန် လည်ပတ်မှုအဆစ်များစွာပါရှိသော အဆစ်ဘရိတ်ကိရိယာ၊ ဘရိတ်ကိရိယာတပ်ဆင်ထားသောကြောင့် အော်ပရေတာသည် လည်ပတ်နေစဉ်အတွင်း မည်သည့်အချိန်တွင်မဆို ကိုင်တွယ်သူ၏လှုပ်ရှားမှုကို အနှောင့်အယှက်ပေးနိုင်သည်။



ဤပါဝါကိုင်တွယ်ကိရိယာအမျိုးအစားသည် workpiece ၏ 500Kg အထိ မတင်နိုင်ပါ။ အလုပ်လုပ်သည့်အချင်းဝက်မှာ 2500mm ခန့်ရှိပြီး မတင်သည့်အမြင့်မှာ 1500mm ခန့်ရှိသည်။ မတင်သည့် workpiece အလေးချိန်ကွဲပြားမှုကြောင့် workpiece ၏ အများဆုံးအလေးချိန်နှင့်အညီ အသေးဆုံးစက်အမျိုးအစားကို ရွေးချယ်သင့်ပြီး၊ workpiece ၏ 30Kg ကို သယ်ဆောင်ရန် manipulator 200Kg အများဆုံးဝန်ကို အသုံးပြုပါက၊ လည်ပတ်မှုစွမ်းဆောင်ရည်မှာ မကောင်းပါ၊ အလွန်လေးလံသည်ဟု ခံစားရသည်။ စက်ပစ္စည်းတွင် လေသိုလှောင်ကန်ပါရှိပြီး ဓာတ်ငွေ့ပြတ်တောက်သွားပါက လုပ်ဆောင်ချက်လည်ပတ်မှုကို ပြီးမြောက်အောင် လုပ်ဆောင်နိုင်သည်။ တစ်ချိန်တည်းမှာပင်၊ ၎င်းသည် အော်ပရေတာအား သတိပေးရန် အချက်ပေးသံ ပေးလိမ့်မည်။ လေဖိအားသည် အတိုင်းအတာတစ်ခုအထိ ကျဆင်းသွားသောအခါ၊ workpiece ကျဆင်းမှုကို ကာကွယ်ရန် self-locking လုပ်ဆောင်ချက်ကို စတင်ပါလိမ့်မည်။ ဘေးကင်းရေးစနစ်ပါရှိသော manipulator သည် ကိုင်တွယ်ခြင်းလုပ်ငန်းစဉ်တွင် သို့မဟုတ် workpiece ကို ဘေးကင်းသောနေရာတွင် မထားရှိပါက အော်ပရေတာသည် workpiece ကို မလွှတ်ပေးနိုင်ပါ။ စံမမီသော ပစ္စည်းကိရိယာအမျိုးမျိုးဖြင့်၊ hard arm အမျိုးအစား power manipulator သည် လုပ်ငန်းစဉ်လုပ်ဆောင်ချက်အမျိုးမျိုးကို အလွယ်တကူ ပြီးမြောက်စေနိုင်သည်။





